









Hola a todos, muchos de vosotros ya sabéis que llevo mas de 40 años de operador de maquinas de obras publicas, de ellos, mas de 25 años de autónomo.
Hace ya muchos años que estaba pensando en crear un sistema para las excavadoras y hacernos el trabajo mas ameno y ayudarnos a dar nivel a una zanja, hacer un talud y como no, los que habéis hecho pozos para cimentaciones sabéis lo difícil que es llevar las paredes rectas, no hacer cuevas y sobre todo cuando bajas a mas de 2m de profundidad.
Si alguno de vosotros ya ha mirado sistemas 2D, ya existen en el mercado pero lo que tenia muy claro es que tenia que ser un sistema muy económico para que todos los operadoras puedan acceder a el, no me pondré en que sean mejores o peores, cada uno defiende lo suyo.
Hace mas de 2 años que estoy liado con este tema, al encontrar la manera de poder hacer mi proyecto y después de iniciarlo, gracias a uno de los usuarios del foro, joaquinllano, quiero presentaros este sistema que diciéndolo de paso, estamos en conversaciones con una importante marca de Maquinaria de OP que posiblemente podamos darlo a conocer en la próxima feria Smopyc 2017, ya os tendremos al corriente.
Este post va dedicado para todos los profesionales del sector que entendéis las necesidades que tenemos los operadores de maquinaria de obras publicas, y me encantaría que nos digáis que os parece, si veis que falta o sobra alguna cosa, lo que os gusta y lo que no, este proyecto lo hemos hecho con mucha ilusión, pero eso no impide que hagáis vuestra critica siempre y cuando sea constructiva.
En un principio el sistema esta encarado para las excavadoras, tanto de ruedas como de cadenas, pero este sistema también podrá ser instalado en retrocargadoras, bulldozers, motoniveladoras y también en tractores con traílla.
El sistema tiene un acceso para cada operador con numero de operador y contraseña, cada operador sabrá cuantas horas a trabajado con el sistema conectado, las horas que ha trabajado cada maquina y cada cazo, cuando se ha hecho el cambio de cazo o de maquina, el sistema podrá intercambiarse entre maquinas, se podrá tener por ejemplo, 3 maquinas equipadas con los sensores y un solo equipo que podrá ponerse en cada una de las maquinas, si se dispone de Internet el encargado o responsable de la maquinaria podrá monitorizar lo que esta haciendo esa maquina, también dispondrá de un aviso de vuelco enviando un mensaje a quien se quiera para poder rescatar al operador.
El sistema dispondrá de varios idiomas, los que están en estos momentos disponibles son, Español, Gallego y Catalán.
Instalación, nuestra idea es que el sistema se lo instale cada cliente para abaratar costos, ya que es muy fácil de instalar, el sistema como veréis mas abajo, consta de 5 sensores en caso de que la excavadora disponga de 5 botella y 4 sensores en caso que sea monoblock, cada sensor va alimentado con un cable a las baterías, no necesitan ningún otro cable ya que emiten en radiofrecuencia.
Quiero deciros que el sistema todavía lo estamos probando y que puede que con el definitivo no se parezca en nada, pero creo que hay cosas que seguirán igual, bueno os presento este nuevo sistema.
Como podéis ver, esta explicado cada parte de la pantalla principal, lo que es y lo que hace, hemos preferido no poner los menús a la vista para poder tener una lectura mejor, los sistemas actuales para mi son muy pequeños y la gente que ya no vemos de cerca la verdad que se agradece.
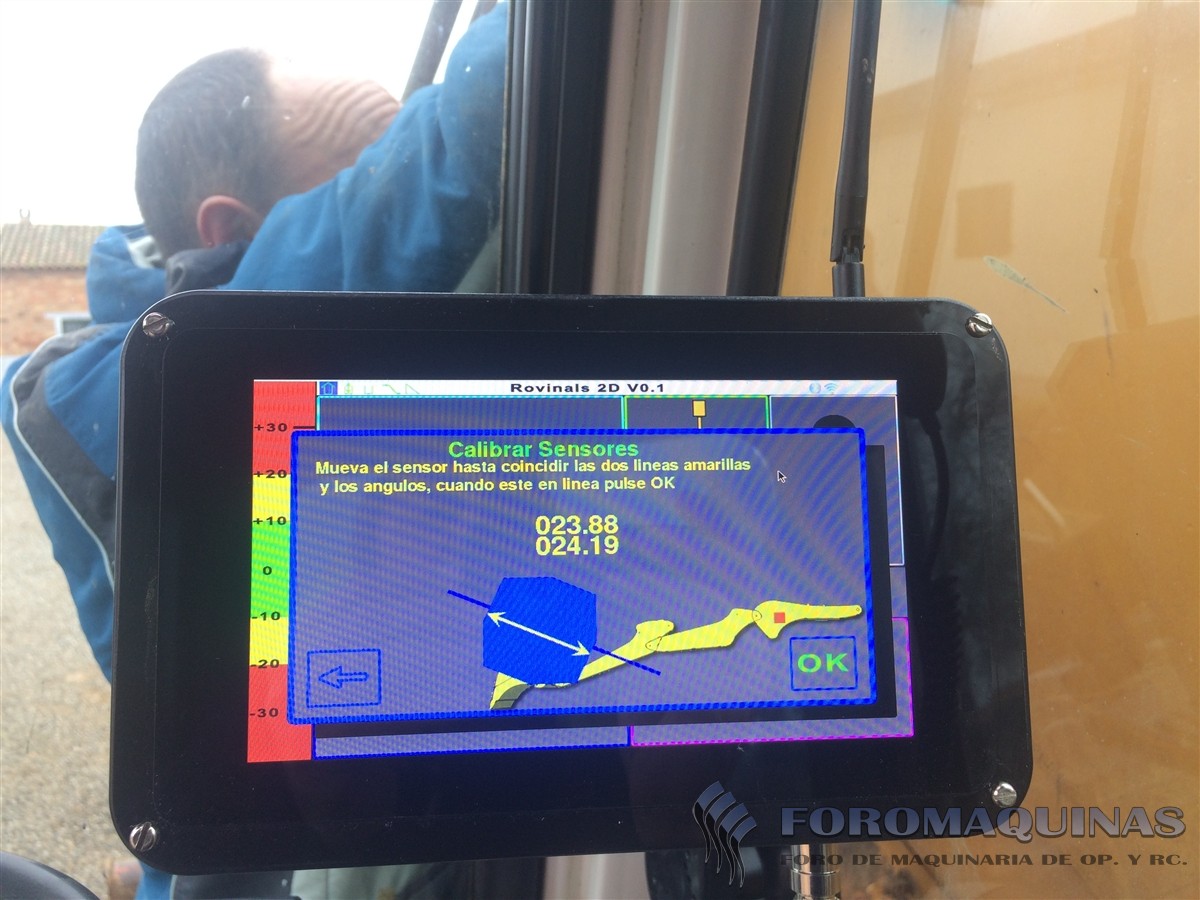
El sistema consta de un sensor por brazo, el primero tiene que ir en el brazo principal, aquí vemos como se calibra, el sistema se encarga de que este en su justo lugar:
El segundo en este caso va en la quinta botella, si fuera el caso que la excavadora sea monoblock, este sensor no se coloca.
El tercero va en el balancín, puede ir en cualquier sitio, mejor que se ponga en algún sitio mas protegido.
El cuarto va en las bielas del cazo, mejor que sea en su parte interior para estar mas protegido.
Y el quinto sensor va en la parte de atrás de la maquina para controlar el giro de la maquina y también los ángulos tanto de un lado a otro como delante atrás.
La pantalla para elegir el tipo de maquina que se va a utilizar.
La configuración, la calibración y el apagado del sistema.
La pantalla de Altas y la configuración de los diversos apartados.
La pantalla de Altas, para añadir cazo, maquina o operador.
Aquí tenéis el tipo de trabajos que se podrá realizar:
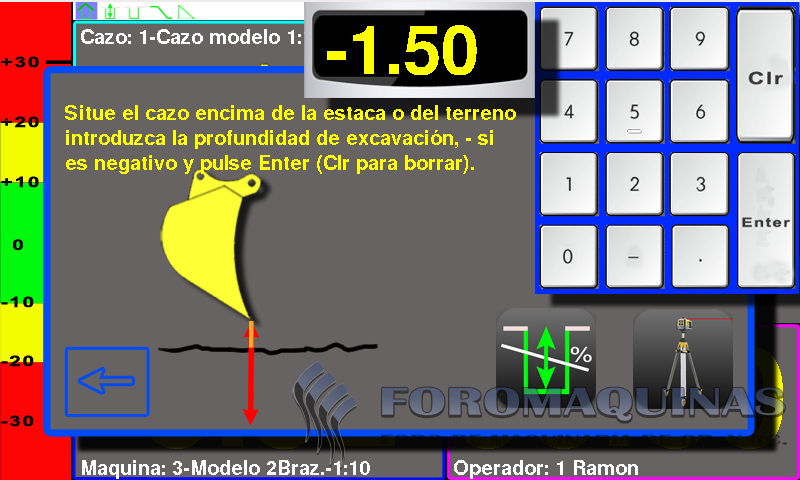
1er. icono: Zanjas, con esta opción podremos realizar zanjas a nivel o en pendiente positiva o negativa(pulsando el icono de la pendiente %), podremos partir de un punto y arrastrar la cota en un posterior movimiento de la maquina, ademas si tenéis instalado el sistema Láser podréis partir de esa referencia.
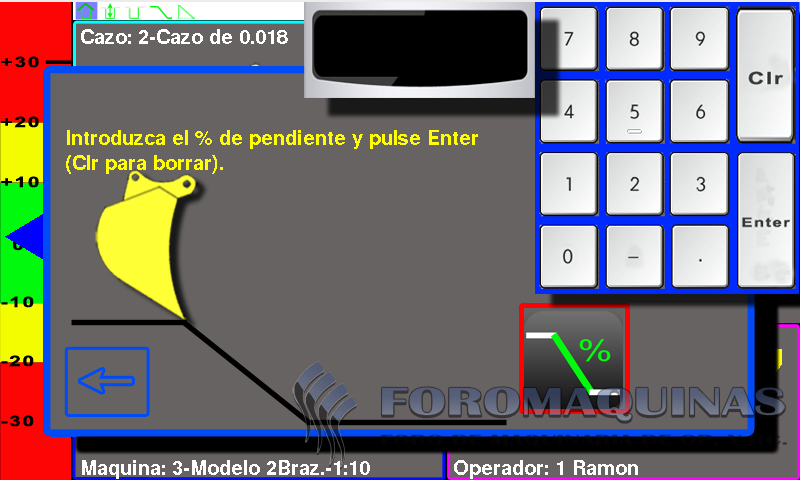
2do. icono: Taludes, en esta opción podemos realizar un talud desde un punto a otro o desde un punto con un % de pendiente, igual de bajada como de subida del talud.
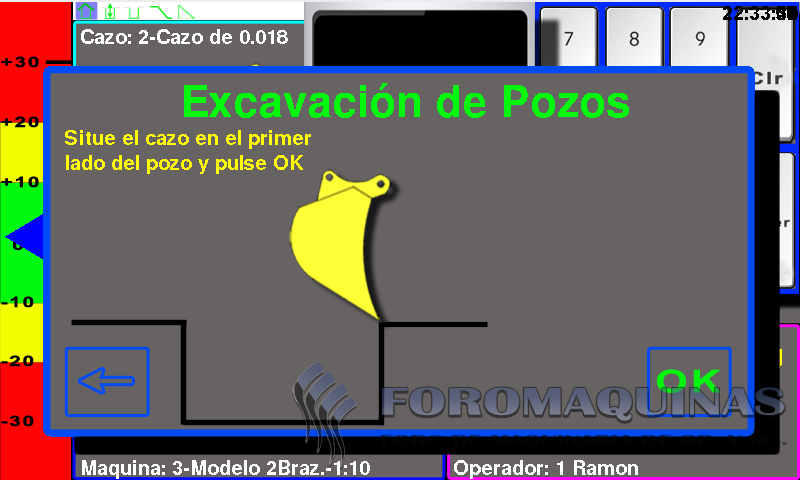
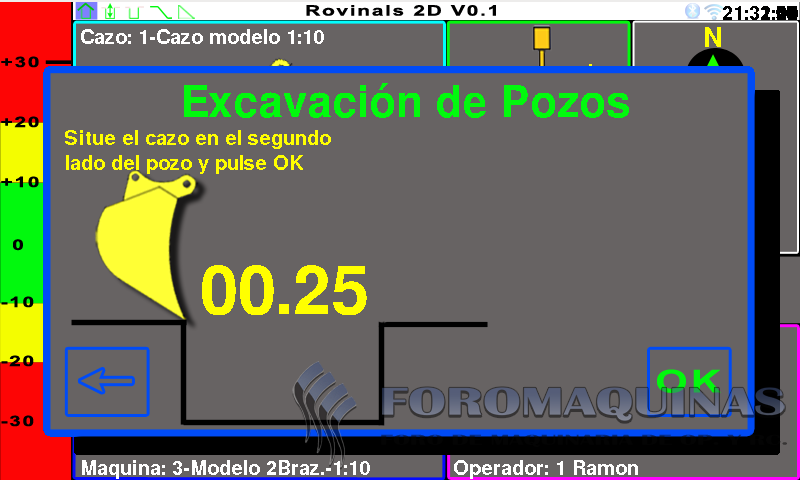
3er. icono: Pozos, todos los que hemos hecho pozos para cimentaciones sabemos lo difícil que es de llevar las paredes rectas y no hacer cuevas, este sistema nos ayudara a guiarnos en nuestro trabajo dándonos las dos verticales del pozo y la cota que tenemos que llegar, ademas con la vista gráfica del cazo veremos en la posición que esta para que no nos pasemos y no quepa mas hormigón del que haga falta.
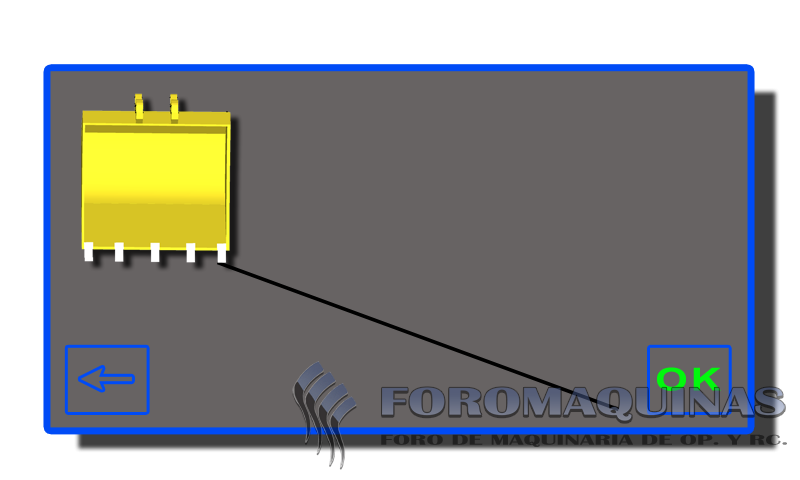
Colocamos el cazo en el primer lado del pozo y pulsamos OK.
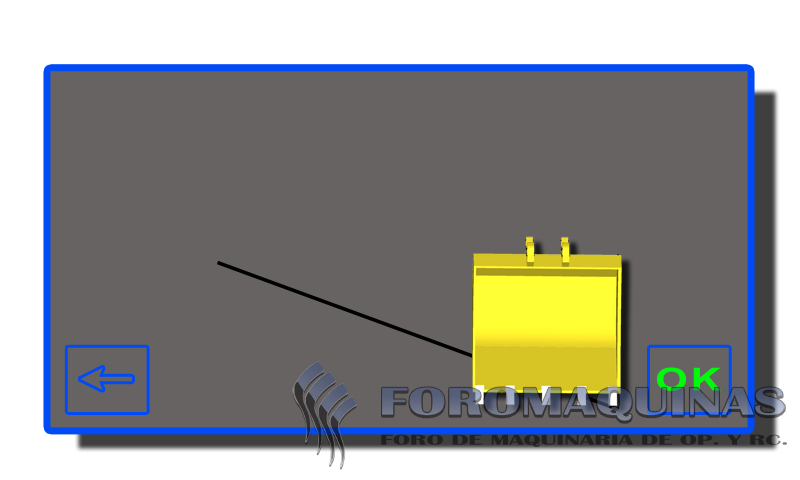
Colocamos el cazo en el otro lado del pozo y pulsamos OK.
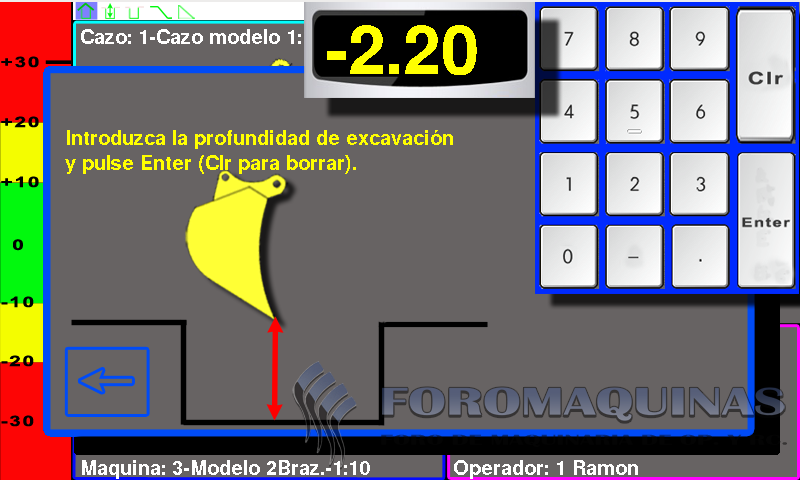
Introducimos la profundidad del pozo y pulsamos Enter.
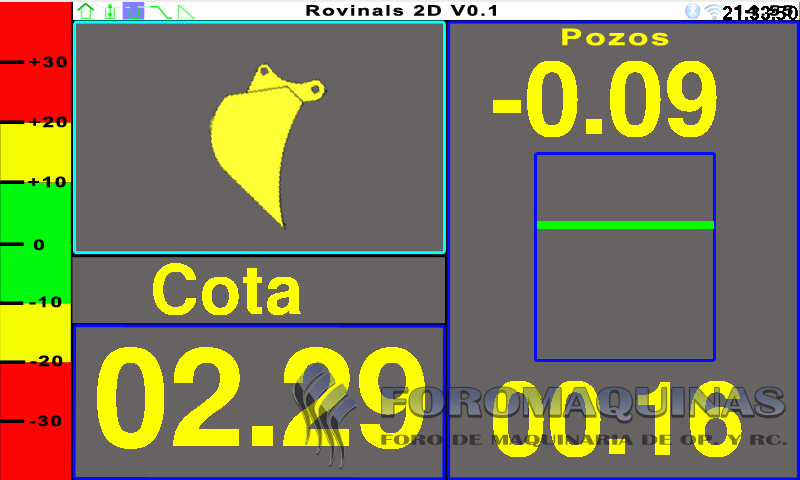
Y en esta pantalla nos indicara con la linea verde donde esta la punta del cazo y lo que nos falta para llegar a un lado o al otro y la profundidad a si como la posición del cazo, ademas el sistema cuenta con avisos acusticos para no tener que estar mirando la pantalla en todo momento, estos avisos pueden configurarse.
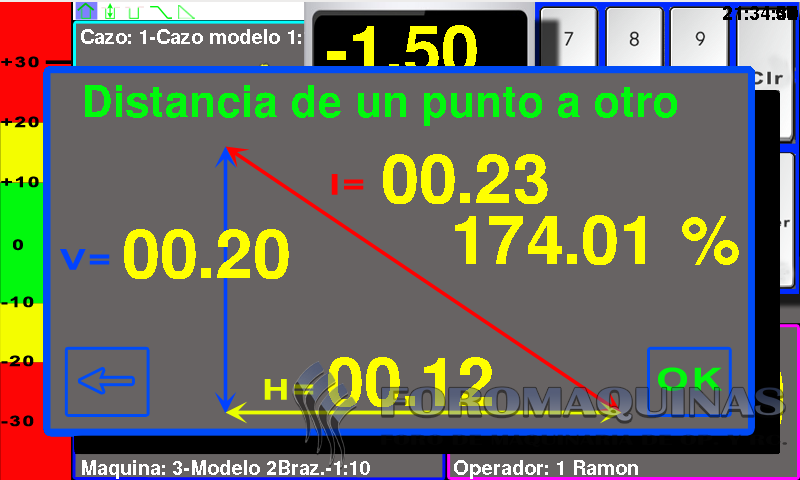
4to. icono: Distancias, cuantas veces hemos tenido que bajarnos de la maquina para conocer la profundidad de un margen o de una zanja, con esta opción nos dará la distancia desde el centro de la maquina, la distancia vertical y la inclinada con su % de pendiente.
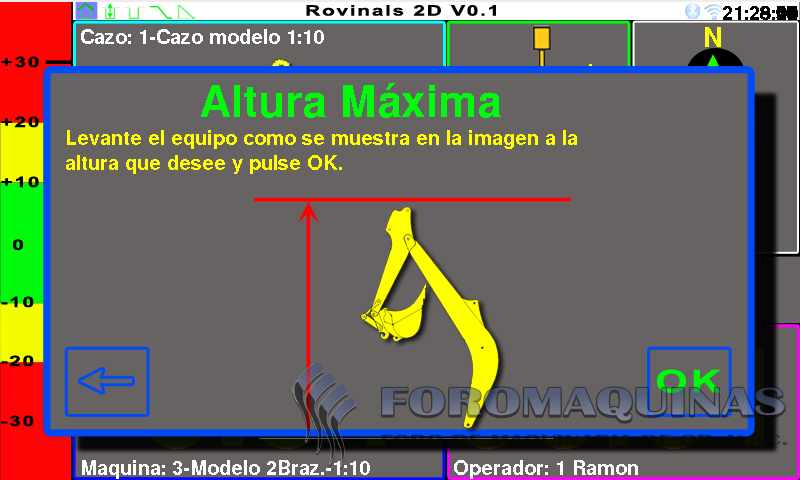
5to. icono: Altura Máxima, si estamos trabajando dentro de un almacén o peor, debajo de unos cables de alta tensión, solo tendremos que utilizar esta opción para que nos avise antes de llegar al máximo que le hayamos marcado subiendo el brazo hasta la altura que veamos que no hay peligro y pulsamos OK, se puede configurar la distancia de seguridad antes de llegar al máximo, lo mas recomendable es 1m.
6to. icono: Linea Desplazada, si se dispone del modulo compás podremos crear una linea ficticia para hacer el corte por ejemplo de un muro estando desplazados o lo que es lo mismo no en la misma linea del corte.
Situamos el cazo en el primer punto de la linea y pulsamos OK.
Situamos el cazo en el segundo punto de la linea y pulsamos OK, ya podemos excavar, el sistema nos ira guiando si estamos en la linea, nos estamos separando o pasando.
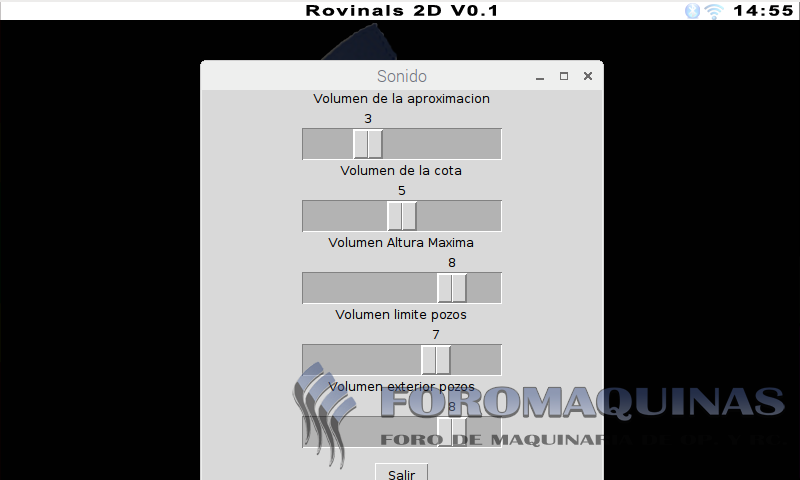
Una de las cosas mas interesantes de este sistema son los avisos acústicos, los cuales se podrán configurar y variar el volumen al gusto del operador.
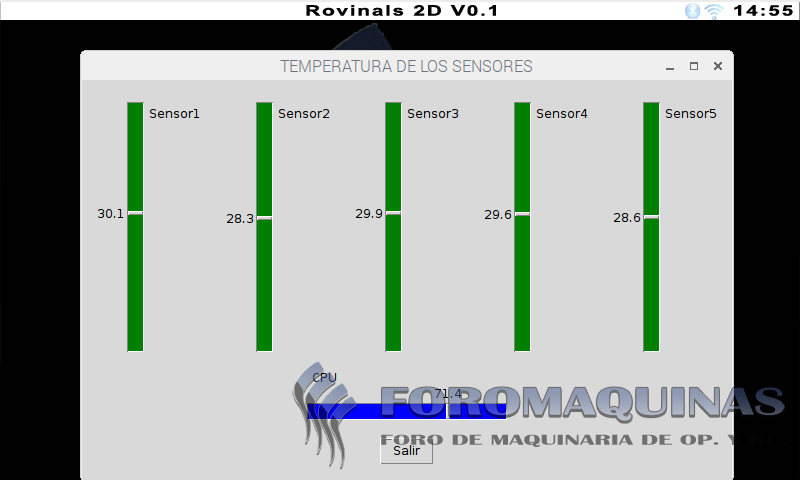
Para que sepamos como esta funcionando los sensores podrá visualizarse la temperatura de todos los sensores en el trabajo, teniendo un aviso en caso que la temperatura sea excesiva.
Os pongo un video de una de las pruebas que hice con este sistema.
Ver video desde Origen
Espero vuestros comentarios.
Si estas interesado en este sistema puedes enviarnos un correo a info@rovinals.com
Saludos.
Bienvenido a ForoMaquinas.com.













 Citar
Citar

Marcadores